PLM Components
Kineo Collision Detector (KCD)
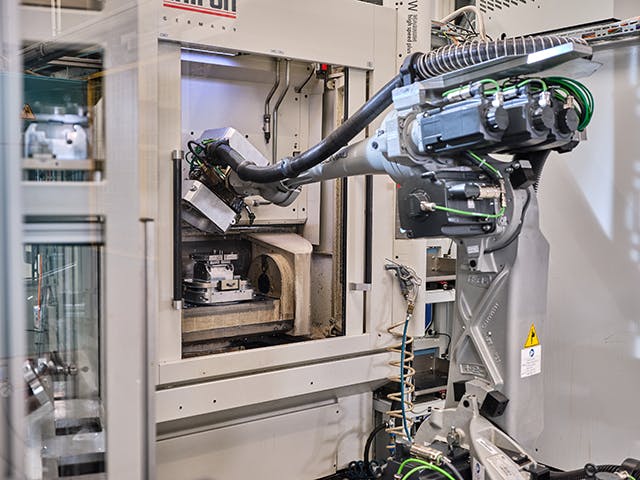
通过集成西门子的 Kineo Collision Detector,在运动仿真应用程序中对网格表面和点云数据执行高速碰撞分析。
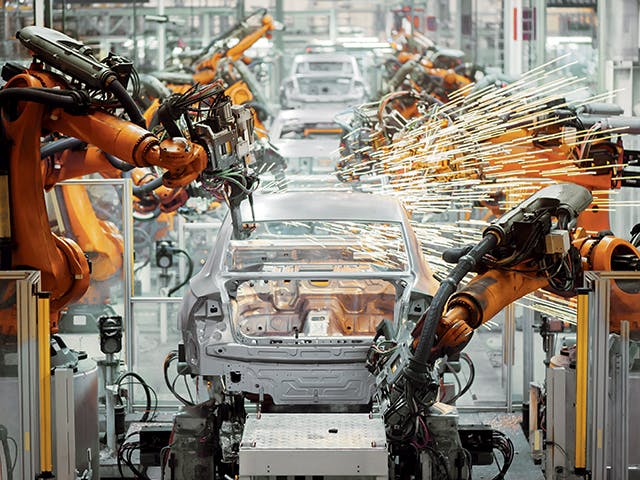
探索我们用于自动运动规划、碰撞检测和柔性电缆仿真的 Kineo 软件组件产品组合。这些技术都集成到汽车、航空航天、能源、造船和制造业的软件应用程序中。应用包括工业机器人仿真、数字样机、组装/拆卸验证以及可访问性研究。
丰富的图形用户界面 (GUI) 框架让 OEM、系统集成商和软件供应商得以根据 Kineo 组件开发定制软件应用程序,同时降低风险并缩短上市时间。
为工业机器人、坐标测量机和机床计算快速、节能的周期时间。
通过无碰撞轨迹计算和预测性电缆性能,可减少制造停机时间。
通过使用我们久经验证的工业软件组件,加速机器人或数字样机软件应用程序的开发。